Tong QIN
秦 通
About
Tong QIN is an Associate Professor at the Global Institute of Future Technology, Shanghai Jiao Tong University.
He received his Ph.D. degree in Hong Kong University of Science and Technology in 2019, under the supervision of Prof. Shaojie Shen at Robotics Institute. Before that, he received the B.Eng. degree from Zhejiang University in 2015, under the supervision of Prof. Chao Xu. He was a research intern in Facebook Reality Labs during Spring and Summer, 2019, worked with Prof. Anastasios Mourikis. After graduation, Tong QIN was chosen as TopMinds (天才少年) by Huawei. During 2019-2023, he led a research team in Intelligent Vehicle BU and developed advanced autonomous driving solutions, ADS1.0 and ADS2.0, which were widely used on commercial vehicles, such as Avatar Changan (长安阿维塔), M5/M7 Wenjie(问界). Finally, Tong QIN returned to the academia, worked with Prof. Ming Yang at Intelligent Vehile Labs, SJTU. He was selected as Elsevier's 2024 'Highly Cited Chinese Researchers'.
His research interests include SLAM, end-to-end autonomous driving, and emodied AI.
Contact : qintong at sjtu.edu.cn, qintonguav at gmail.com;
Welcome any internship! If you want to apply for post-graduate degree, please contact me in advance!
欢迎各种实习!如果想申请硕士、博士研究生,请提前进组实习,有科研产出的实习生将会优先录取!
Last update: 2025/04/05
Conference papers (selected):
T Qin, P Li, S Shen
IEEE Transactions on Robotics
(TRO 2018 Best Paper Honorable Mention)


International Conference on Inteligent
Robots and Systems (IROS 2018)
Best Student Paper
News


IEEE Transactions on Robotics
Honorable Mention Best Paper Award
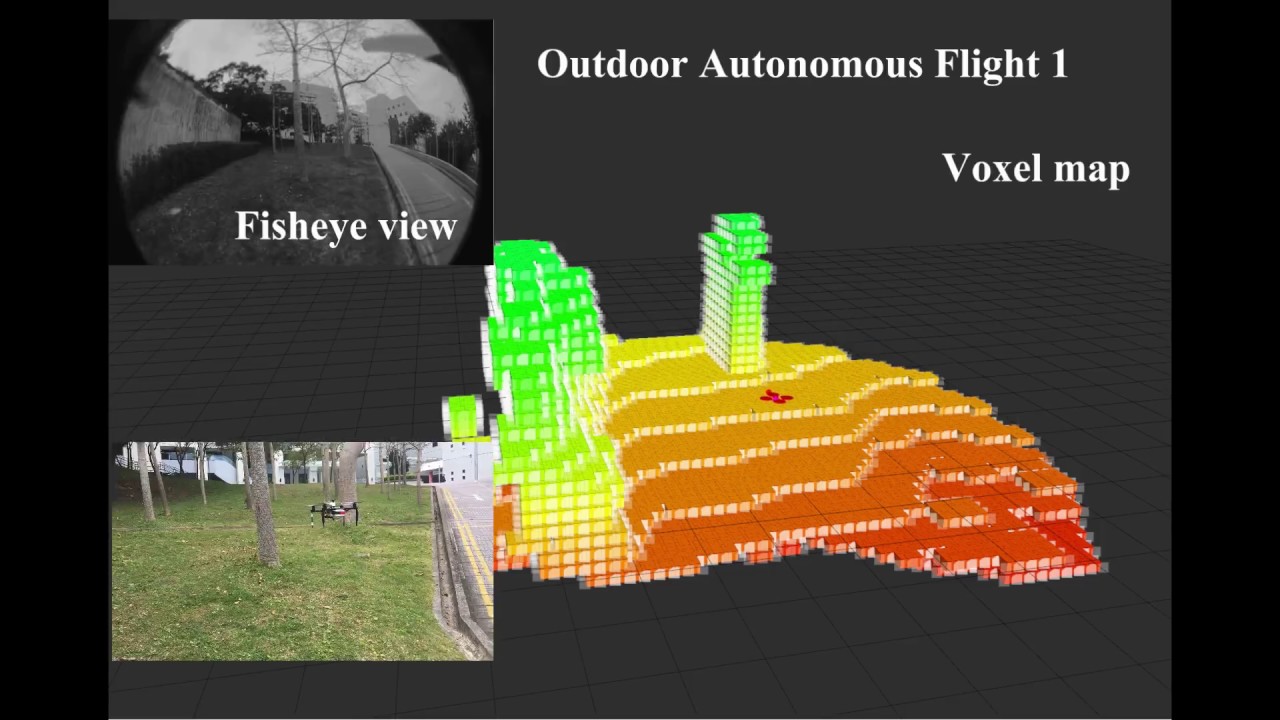
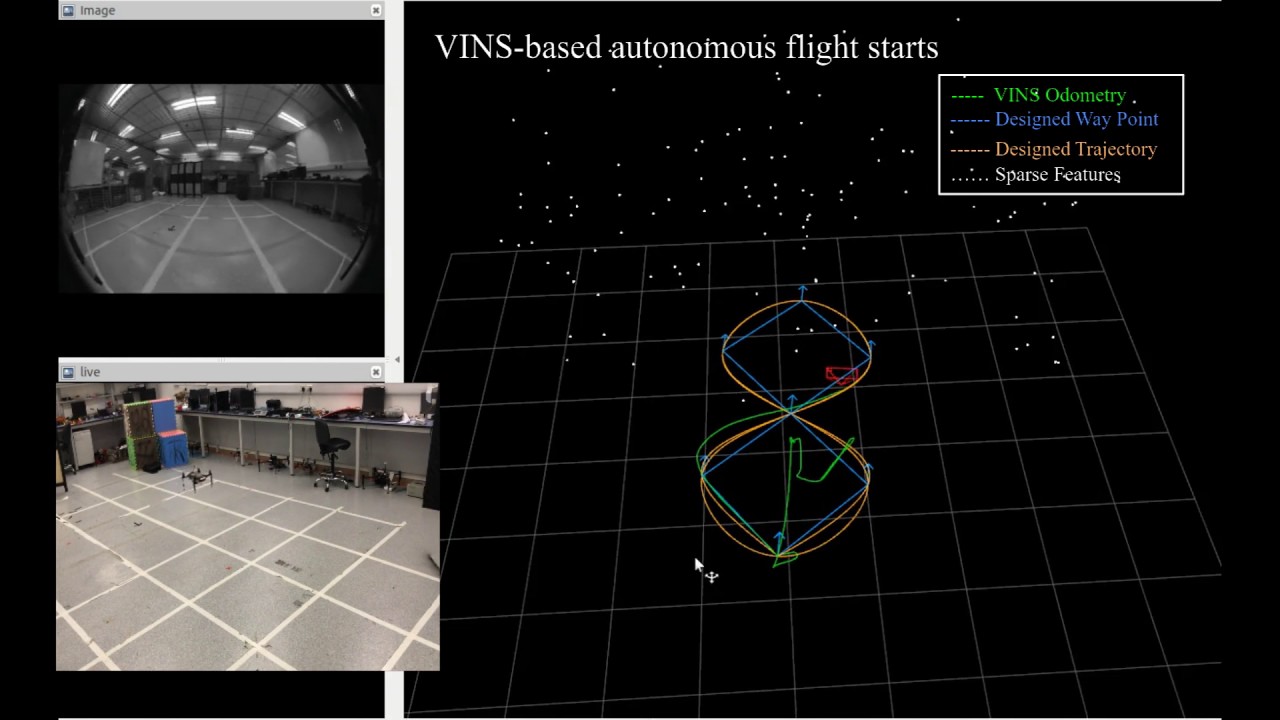
Autonomous aerial navigation using monocular visual‐inertial fusion
Y Lin, F Gao, T Qin, W Gao, T Liu, W Wu, Z Yang, S Shen
Journal of Field Robotics
VINS-Mono: A Robust and Versatile Monocular Visual-Inertial State Estimator
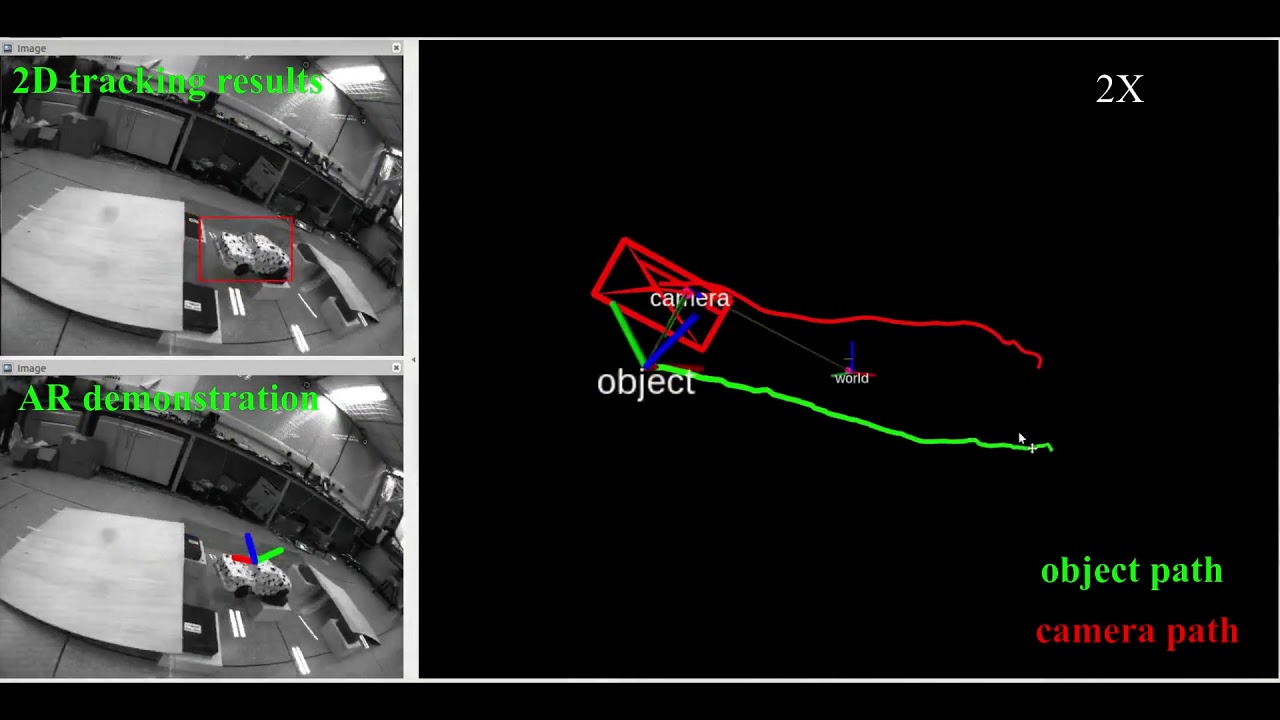
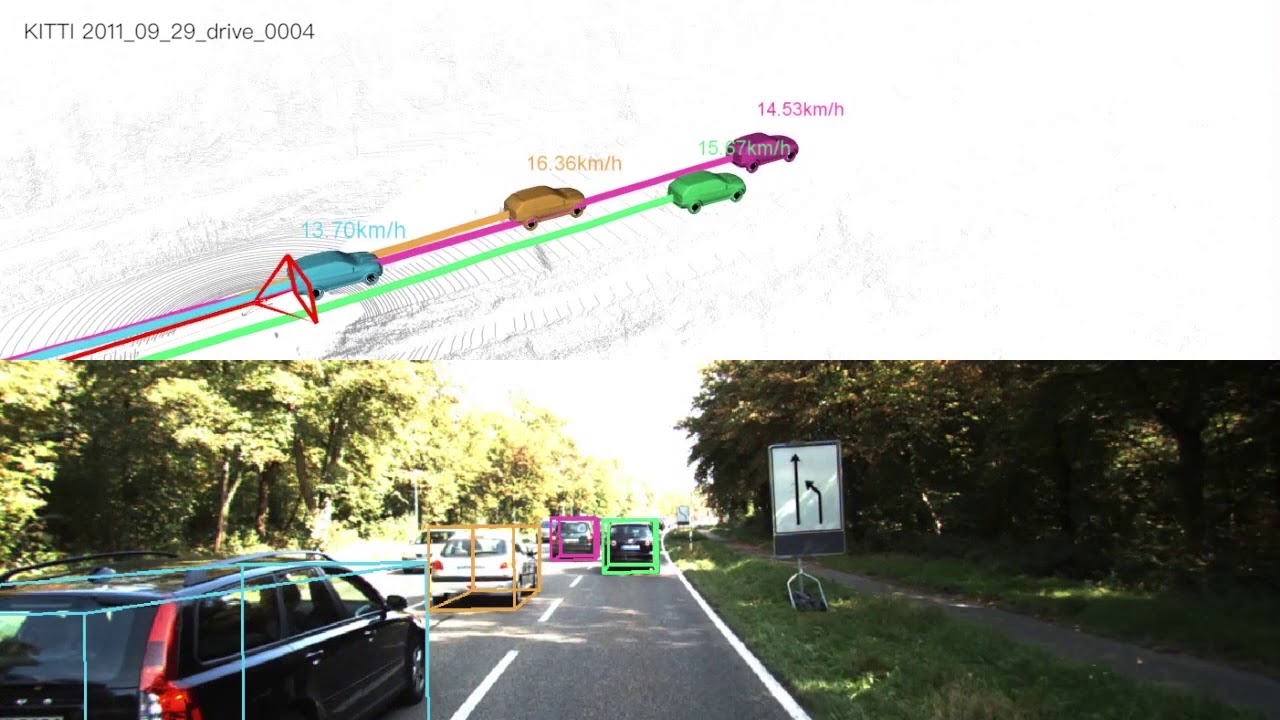
Tracking 3-D Motion of Dynamic Objects Using Monocular Visual-Inertial Sensing
K Qiu, T Qin, W Gao, S Shen
IEEE Transactions on Robotics
Publications
Journal articles (selected):
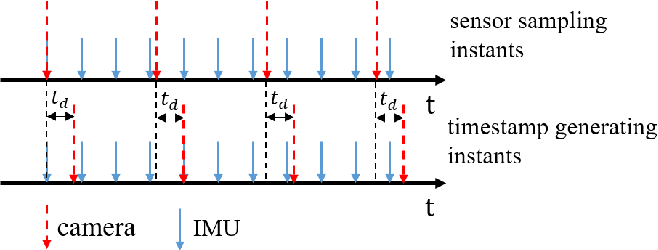
Online temporal calibration for monocular visual-inertial systems
T Qin, S Shen
2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
(IROS 2018 Best Student Paper)
Stereo Vision-based Semantic 3D Object and Ego-motion Tracking for Autonomous Driving
P Li, T Qin, S Shen
the European Conference on Computer Vision (ECCV)
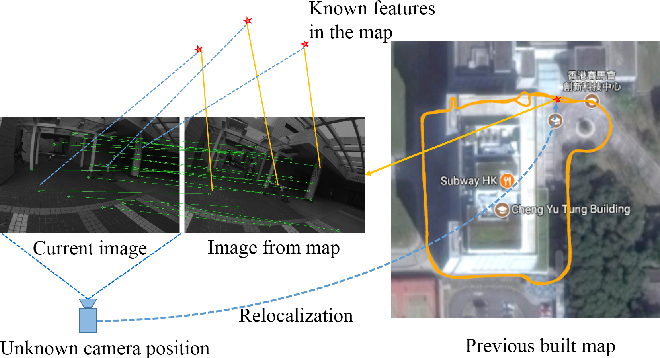
Relocalization, Global Optimization and Map Merging for Monocular Visual-Inertial SLAM
T Qin, P Li, S Shen
2018 IEEE International Conference on Robotics and Automation (ICRA)
Robust initialization of monocular visual-inertial estimation on aerial robots
T Qin, S Shen
2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
Monocular visual-inertial state estimation for mobile augmented reality
P Li, T Qin, B Hu, F Zhu, S Shen
2017 IEEE International Symposium on Mixed and Augmented Reality (ISMAR)
2011 - 2015
Zhejiang University
B.Eng. in Automation
Education

2023 - now
Associate Professor
CyberC3 Intelligent Vehicle Labs, Global Institute of Future Technology, Shanghai Jiao Tong University
2019.4 - 2019.8
Facebook Reality Labs, Seattle
Research Intern
AR/VR research
Experience


2019.9 - 2023.9
Huawei Technology, Shanghai
Top minds(天才少年)Research Engineer
Autonomous Driving
Open Project
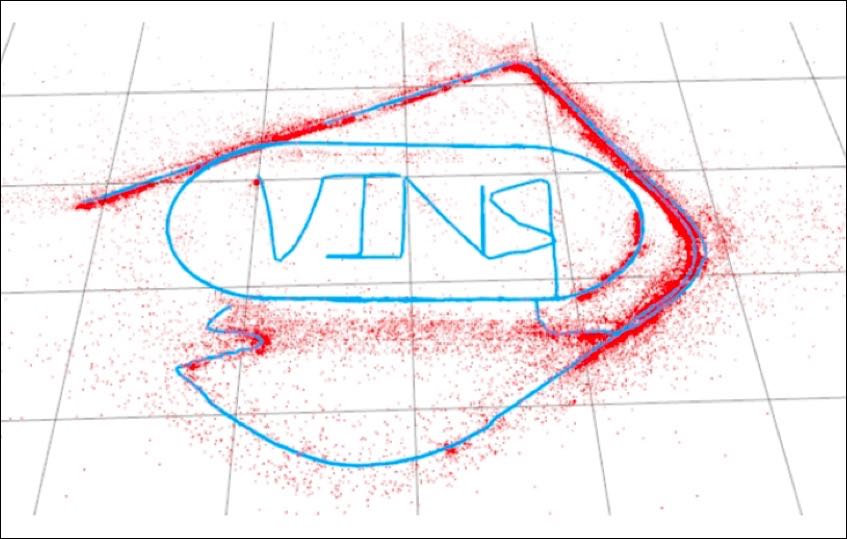
VINS: a real-time SLAM framework for Visual-Inertial Systems. It achieves high-accuracy state estimation by fusing cameras and IMU. It can provide accurate localization for autonomous drones and AR applications.
Open-source code: [VINS-Mono] [VINS-Fusion] [VINS-Mobile]

2015 - 2019
Hong Kong University of Science
and Techonology
Ph.D. in Electronic and Computer Engineering
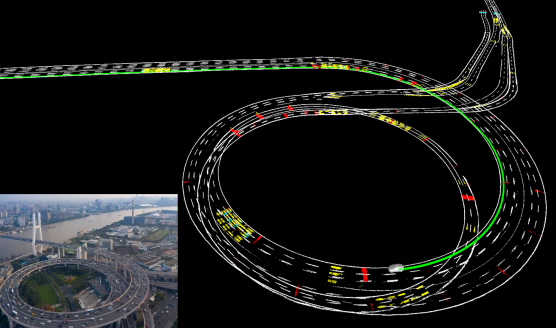
T Qin, H Huang, Z Wang, T Chen, W Ding
IEEE Robotics and Automation Letters (RA-L), 2023
Traffic Flow-Based Crowdsourced Mapping in Complex Urban Scenario
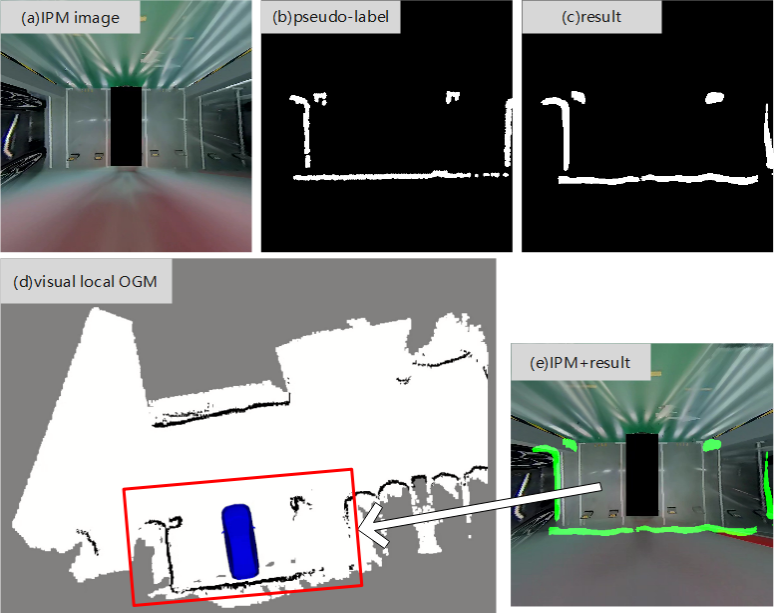
Inverse Perspective Mapping-Based Neural Occupancy Grid Map for Visual Parking
Xiangru Mu, Daojun Zhu, Haoyang Ye, Tongqing Chen, and Tong Qin
2023 IEEE International Conference on Robotics and Automation (ICRA)
RoadMap: A Light-Weight Semantic Map for Visual Localization towards Autonomous Driving
Tong Qin, Yuxin Zheng, Tongqing Chen, Yilun Chen, and Qing Su
2021 IEEE International Conference on Robotics and Automation (ICRA)
AVP-SLAM: Semantic Visual Mapping and Localization for Autonomous Vehicles in the Parking Lot
Tong Qin, Tongqing Chen, Yilun Chen, and Qing Su
2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
Awards
2023.9 I graduate from Huawei, return back to the university (SJTU).

Most Cited Chinese Researchers
Elsevier's 2024
Tong Qin, Changze Li, Haoyang Ye, Shaowei Wan, Minzhen Li, Hongwei Liu, Ming Yang
IEEE Transactions on Intelligent Transportation Systems, 2024
Crowd-Sourced NeRF: Collecting Data From Production Vehicles for 3D Street View Reconstruction

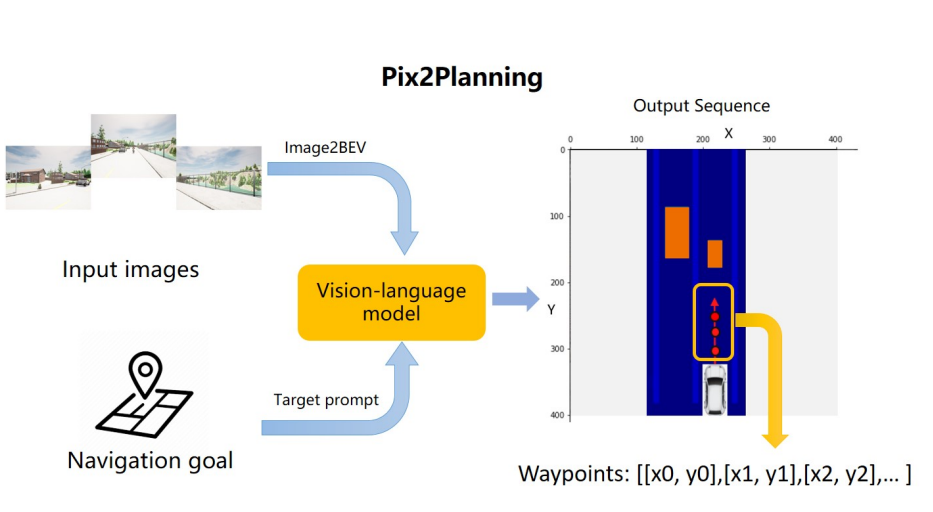
Pix2Planning: End-to-End Planning by Vision-language Model for Autonomous Driving on Carla Simulator
Xiangru Mu, Tong Qin, Songan Zhang, Chunjing Xu, Ming Yang
2024 IEEE Intelligent Vehicles Symposium (IV)
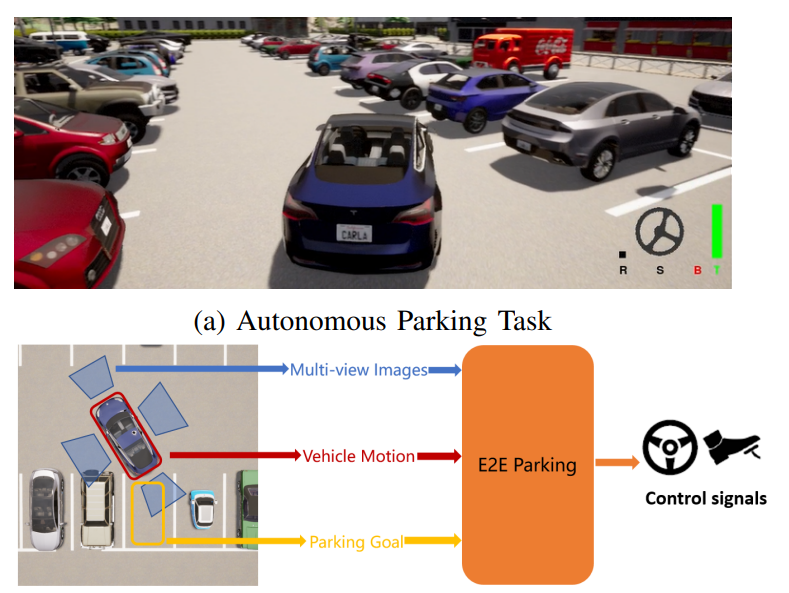
E2e parking: Autonomous parking by the end-to-end neural network on the carla simulator
Yunfan Yang, Denglong Chen, Tong Qin, Xiangru Mu, Chunjing Xu, Ming Yang
2024 IEEE Intelligent Vehicles Symposium (IV)
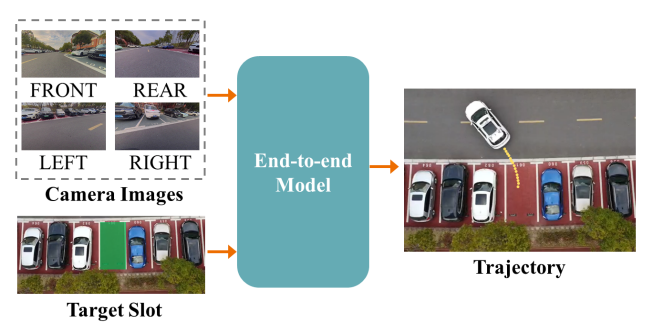
ParkingE2E: Camera-based End-to-end Parking Network, from Images to Planning
Changze Li, Ziheng Ji, Zhe Chen, Tong Qin, Ming Yang
2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)